はじめに
2025年10月から3月にかけて株式会社モルフォでインターン活動を行った、樽谷遼太郎です。
視線推定(Gaze Estimation)とは赤外線やカメラなどのセンサを用いて眼球の回転角から視線ベクトルを求めるタスクです。本プロジェクトでは10万フレームを超える大規模な検証を行い、エッジデバイス上でのリアルタイム動作と、実用的な精度を両立させることができました。その手法について詳しくご紹介します。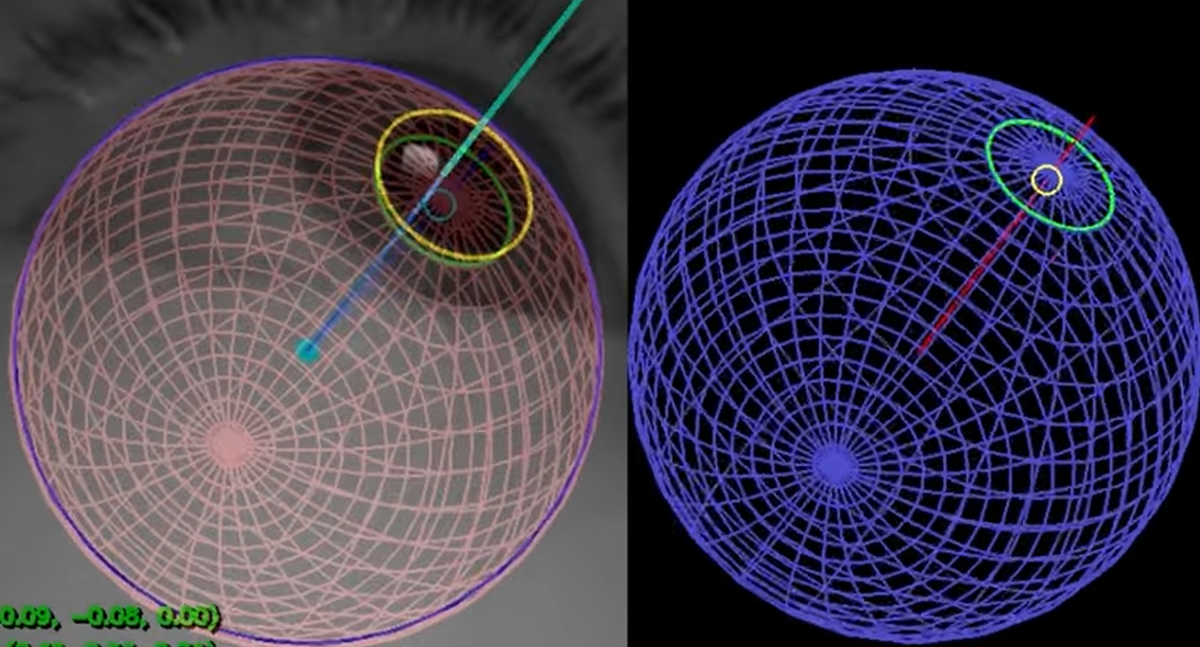
2025年10月から3月にかけて株式会社モルフォでインターン活動を行った、樽谷遼太郎です。
視線推定(Gaze Estimation)とは赤外線やカメラなどのセンサを用いて眼球の回転角から視線ベクトルを求めるタスクです。本プロジェクトでは10万フレームを超える大規模な検証を行い、エッジデバイス上でのリアルタイム動作と、実用的な精度を両立させることができました。その手法について詳しくご紹介します。
はじめまして。2025年の11月から三か月間株式会社モルフォでインターンをしておりました、東京大学精密工学科三年の高木悠貴哉と申します。 今回は「AIを用いた自動手順書作成ツールの開発」というテーマのもと、近年話題となっているLLMを用いて作業記録から手順書を作成するアプリ開発に取り組みました。 この記事ではインターンシップを通して私が作成した成果物を紹介していきたいと思います
モルフォには、社員が自身の「やりたい(Will)」を起点として自律的に研究開発や業務改善に取り組むことを後押しする、「Will型開発」という独自の仕組みがあります。その一環として行われた「Will型アイデアハッカソン」にて、「画面録画による作業ログ探索」というテーマで試作された「Morpho Work Logger」というデモツールがあり、本テーマはそこから着想を得ました。
「Will型アイデアハッカソン」の開催レポートはこちら
続きを読むこんにちは。 2025年度入社のリサーチャーの安達です。 今回は、弊社で実施している新人グループ研修について報告します。
今年度の参加者は安達、周、ユガンダーの3名で、2か月間にわたりチーム開発を実施しました。 テーマは自然言語での画像レタッチングです。
続きを読む先日、日本ディープラーニング協会主催(JDLA)の「CVPR2025技術報告会」にてモルフォの技術者が登壇いたしました。本記事では、当日の資料を共有するとともに、その発表内容をダイジェストでお届けします。
CVPR(The IEEE / CVF Conference on Computer Vision and Pattern Recognition)は、コンピュータビジョン(画像認識技術)の分野で世界最高峰とされる国際学会です。昨年に引き続きまして、CVPRの重要性や、今年のトレンドの分析、モルフォの技術者が注目した分野や論文について詳しく解説しました。
続きを読むこんにちは。2024年10月入社のカエンと、11月入社のスウです。今年度の新人グループ研修について報告します。
弊社では2か月間のグループ研修を実施しています。今年度の参加者は陳 華炎(カエン)、鄒 宇傑(スウ)と趙 汝豪(ジョゴウ)の3名で、テーマは「Privacy-Preserving Camera(プライバシー保護カメラ)」です。

スマートフォンの普及によって、写真を撮るチャンスが大幅に増えてきました。しかし、イベントや取材、日常のスナップショットなどで第三者の顔が映り、意図せず拡散されることは少なくないと思います。このような状況では、映ってしまった画像や動画は加工・修正する必要がありますが、手動では手間がかかります。そのため、手軽に写真・動画撮影の際のプライバシーを保護できるようなアプリを開発したいと考えました。
この研修では、リアルタイムで顔をぼかせる処理の実装を目標とし、特に利用者が多いスマートフォンに向けて開発しました。
続きを読むこんにちは。モルフォCTO室シニアリサーチャーの芳賀です。
今回は、モルフォ独自の制度である「Will型開発」を活用し開催した「Will型アイデアハッカソン」について、その活動内容や成果をご報告したいと思います。
株式会社モルフォでは、社員一人ひとりの自律性を尊重し、新しいアイデアや技術の探求を促進するための制度として、「Will型開発」を推進しています。 これは、技術者をはじめとする社員が自身の「やりたい(Will)」を起点として、自律的に研究開発や業務改善に取り組むことを後押しする仕組みです。
続きを読むこんにちは、CTO室リサーチャーの長山と申します。
モルフォでは毎週金曜日に持ち回りで論文紹介等を行うJournal Clubという取り組みを行っています。 今回は、前回執筆した Schrödinger Bridge Part I techblog.morphoinc.com の続編として、 Part II をお届けします。 詳細についてはスライド*1をご覧ください。
Part Iでは、Schrödinger Bridge (SB) 問題の基本的な定式化と理論的背景について解説しました。 今回のPart IIでは、SB問題を解くための3つの主要アプローチに焦点を当て、それぞれの特徴や最新の発展について詳しく見ていきます。
*1:余談ではありますが、本スライドは組版ソフトの Typst と、プレゼンテーション用パッケージの Touying を用いて作成されました。リアルタイムプレビュー可能な LaTeX のような趣なので、エンジニアの方々にはおすすめです。